 MENU
MENU 

Jessy Grizzle named Elmer G. Gilbert Distinguished University Professor
Prof. Grizzle is an internationally renowned researcher in the area of control systems.
 Enlarge
EnlargeJessy Grizzle has been named the Elmer G. Gilbert Distinguished University Professor of Engineering. Prof. Grizzle is also the Jerry W. and Carol L. Levin Professor of Engineering, professor of EECS, and professor of mechanical engineering.
Distinguished University Professorships, established in 1947, recognize full or associate professors for exceptional scholarly or creative achievement, national and international reputation, and superior teaching skills. Faculty are given the opportunity to determine the name of the professorship.
“One of the reasons I’m excited to receive this award,” said Prof. Grizzle, “is the ability to honor the career of Elmer G. Gilbert. He was a true pioneer – both as a researcher in the area of Control and as an entrepreneur, founding the successful company Applied Dynamics (now Applied Dynamics International) more than 50 years ago.”
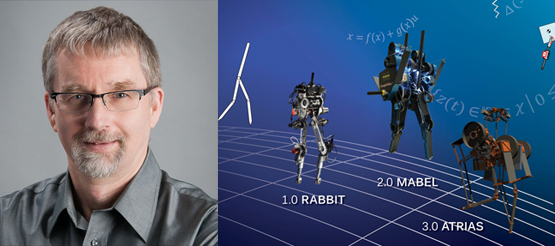
Prof. Grizzle is an internationally renowned researcher in the area of control systems. He has received significant accolades both professionally and in the popular press for his work in the area of bipedal robots. He shares his excitement for the field with local K12 children, who get turned on to science and engineering after visiting his lab. [Visit Jessy’s Dynamic Leg Locomotion YouTube Page]
According to David C. Munson, Jr., Dean of the College of Engineering, “It is not often that the work of a superb scholar is such that it can be displayed for the world to see. Jessy’s innovative theoretical concepts, together with his technological developments in the form of bipedal robots, represent a major breakthrough in the field of robotics. Jessy’s research will have major ramifications in many fields from mobile assistance in the household to medical rehabilitation and prosthetics.”
Prior to his application of nonlinear control theory to robotics, Jessy made important contributions to the design of environmentally friendly powertrains, working in collaboration with Professors Sun (NAME), Kolmanovsky (Aero), Stefanopoulou (ME), and Cook (ECE), resulting in 16 patents. More recently, he turned his attention to hybrid electric vehicles (HEVs), teaming with Professor Peng (ME) to design a power management control strategy for hybrid electric trucks that was adopted by Eaton in a nation-wide design competition. His invisible algorithms are now part of the HEV technology used in Federal Express trucks.
Prof. Grizzle is also a gifted educator, making him a favorite teacher among students in the department, both undergraduate and graduate. The appreciation goes two ways. “Everything good that happens to me is because of these fantastic students who come to the University of Michigan,” Jessy said. “My graduate students do their 5 years of hard deep work contributing to research and technology that is often only recognized years later. I accept this honor on their behalf.”
Prof. Grizzle was named to the Scientific American Top 50 Technologists of 2006 for his work with the robot RABBIT, and received a Popular Mechanic’s Breakthrough award for his work with MABEL. He received the IEEE Control Systems Technology Award for the development of fuel-efficient and environmentally friendly automotive powertrains, the George S Axelby Outstanding Paper Award from the IEEE Transactions on Automatic Control for his very first paper on the feedback control of bipedal locomotion, and the Ford Innovation Award. He was awarded the IEEE Control Systems Society Bode Prize in 2012.
At Michigan, he received the College of Engineering Atwood Award (highest faculty achievement award within the College), the University of Michigan Distinguished Faculty Achievement Award, the U-M Henry Russel Award (for distinguished scholarship and teaching), and the Eta Kappa Nu Best Professor Award.
Prof. Grizzle is coauthor of the book, Feedback Control of Dynamic Bipedal Robot Locomotion. He is a Fellow of IEEE and of the International Federation of Automatic Control (IFAC).
 Enlarge
EnlargeElmer G. Gilbert earned his B.S.E. and M.S.E. degree in electrical engineering and Ph.D. in instrumentation engineering in 1952, 1953, and 1957, respectively, from the University of Michigan. He stayed at Michigan, becoming a faculty member in the department of Aerospace Engineering.
He was a leader in the development of new theory and applications in the area of control systems, moving frequently between mathematical system theory and hardware. In control theory, he is well known for the “Gilbert realization,” still a standard topic in systems textbooks, and developed the foundational results for control over a moving horizon, which underlies model predictive control (MPC). On the hardware side, he was a key member of the design group responsible for the conception and development of analog hybrid computer systems, and an inventor of high performance computer devices.
Prof. Gilbert is a member of the National Academy of Engineering, and received prestigious awards in the area of Control, including the Richard E. Bellman Control Heritage Award, and the IEEE Control Systems Award. He co-founded Applied Dynamics in 1957, and holds 9 patents in simulation and control technology.